- به وب سایت گروه مهندسی isee خوش آمدید
- 09124787535
- info@iseeco.co
کنترل Servo Motors با جوی استیک Arduino

بررسی پلتفرم OpenHab
نوامبر 10, 2020
تاثیر سرعت اینترنت در خانه هوشمند
نوامبر 10, 2020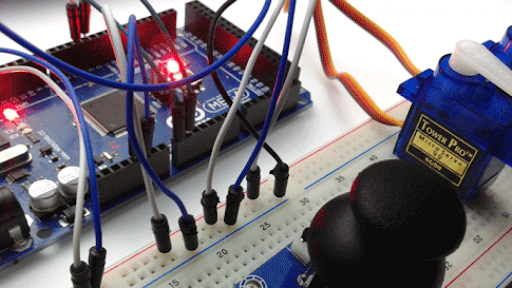
ایده پشت این پروژه داشتن جایگاهی است که بتوانید دوربین یا چیز دیگری در آن قرار دهید و با استفاده از جوی استیک کنترل Servo Motors را بدست داشته باشید .
جوی استیک Arduino چیست؟
جوی استیک آردوینو بسیار شبیه همان چیزی است که در بسیاری از کنترلرهای بازی پیدا می کنید اما اگر زیر آن را نگاه کنید ، تمام جادوها به لطف 2 پتانسیومتر اتفاق می افتد ، یکی برای X-Axis و دیگری برای Y-Axis.
در واقع از پتانسیومترها برای تولید حرکت دو بعدی با تولید سیگنال های آنالوگ استفاده می شود . برخی از ماژول ها دارای یک دکمه فشار نیز هستند که می تواند برای رویدادهای خاص مورد استفاده قرار گیرد .
ماژول Joystick ابزاری است که حرکت دست شما را به سیگنال های الکتریکی تبدیل می کند ، به عبارت دیگر ، جوی استیک حرکات کاملاً فیزیکی را به یک فرم دیجیتالی ترجمه می کند که توسط کنترل کننده Arduino قابل تفسیر است .
پتانسیومترها اساساً مقاومت های متغیری هستند که در ماژول جوی استیک استفاده می شوند و به عنوان سنسورهایی عمل می کنند که بسته به حرکت جوی استیک در اطراف شافت های آن ، ولتاژ متغیری را ایجاد می کنند .
ماژول جوی استیک آردوینو
ماژول جوی استیک آردوینو دقیقاً مانند هر جوی استیک با این مزیت که پین های آن در دسترس است تا سیگنال ها را به راحتی به میکروکنترلر ، آردوینو منتقل کند . با استفاده از این ماژول جوی استیک می توانیم محور X ، محور Y و ابعاد Z (دکمه رویدادهای ویژه) را کنترل کنیم .
همانطور که قبلا توضیح داده شد ، پتانسیومترها برای اداره محور X و Y استفاده می شوند در حالی که دکمه فقط یک سوئیچ است . پین های داده برای ابعاد X-Axis و Y-Axis سیگنال های ورودی آنالوگ هستند در حالی که پین بعد Z از یک دکمه ورودی دیجیتال استفاده می کند . به همین دلیل ، پورت های X و Y به پین های آنالوگ Arduino متصل می شوند ، در حالی که پورت Z به پین دیجیتال میکروکنترلر متصل می شود .
هنگامی که بازوی جوی استیک را می چرخانید ، مقاومت در پتانسیومتر را تغییر می دهید . اگر دکمه جوی استیک در خلاف جهت مسیر از ترمینال اتصال ورودی باشد ، پس سیگنال حداکثر مقاومت را تجربه می کند .
تغییر مقاومت پتانسیومتر جریان مدار متصل را تغییر می دهد . به این ترتیب پتانسیومتر موقعیت فیزیکی میله را به یک سیگنال الکتریکی تبدیل کرده و آن را به درگاه جوی استیک کنترل کننده منتقل می کند .
برای مطاله مقاله های مفید خانه هوشمند وارد لینک شوید
کنترل Servo Motors
Servo موتورهای کوچک و کارآمدی هستند که با استفاده از میکروکنترلر می توان آن ها را دقیقاً قرار داد . این ویژگی ها ، آن ها را برای کاربردهایی مانند ماشین های اسباب بازی ، روبات ها و هواپیماها بسیار مفید می کند . همچنین می توانند از آن ها در مصارف صنعتی ، رباتیک ، تولید داخل ، داروخانه و تقریباً هر آنچه که تصور کنید استفاده شوند .
مدار سروو در واحد موتور تعبیه شده و دارای شافت موقعیتی است که معمولاً مجهز به دنده است . موتور توسط یک سیگنال الکتریکی کنترل می شود که میزان حرکت شافت را تعیین می کند .
کنترل Servo Motors چگونه است؟
Servo Motors در اصل با ارسال یک پالس الکتریکی با عرض متغیر کنترل می شود . حداقل ضربان ها ، حداکثر نبض ها و میزان تکرار وجود دارد . سرو موتورها معمولاً فقط در 90 درجه در هر جهت و در مجموع 180 درجه می توانند چرخش پیدا کنند ، اگرچه می توانید موتورهایی را پیدا کنید که قادر به چرخش 360 درجه هستند .
موقعیت خنثی موتور به عنوان موقعیتی تعریف می شود که در آن Servo دارای همان مقدار چرخش پتانسیل در جهت عقربه های ساعت یا خلاف جهت عقربه های ساعت باشد . سیگنال PWM ارسال شده به موتور موقعیت محور را تعیین می کند و براساس مدت زمان پالس ارسال شده از طریق پین کنترل است .
Servo انتظار دارد که هر 20 میلی ثانیه یک پالس ببیند و طول پالس فاصله چرخش شافت را تعیین می کند . به عنوان مثال ، یک پالس 1.5 میلی متری باعث می شود موتور به حالت 90 درجه برود . آن را خلاف جهت عقربه های ساعت به موقعیت 0 درجه و کمتر از 1.5 میلی ثانیه حرکت دهید. هر موقعیتی بیشتر از 1.5 میلی ثانیه باعث چرخش سروو در جهت عقربه های ساعت به سمت موقعیت 180 درجه می شود .

{kind=link}